

Oregon State University's liquid bi-propellant system, designed, integrated, and validated entirely by students. Powered by HALE's liquid engine, Mira 2.
About Cetus
Cetus is Oregon's first kerolox rocket, designed and built entirely by the Oregon State University HALE team. Named after the great whale constellation, Cetus represents years of research, testing, and engineering innovation dedicated to advancing collegiate liquid rocketry and creating the next generation of engineers.
Standing 21 feet tall, Cetus is powered by a liquid oxygen and Jet-A propulsion system engineered entirely in-house by HALE students. The vehicle serves as a milestone for the team's technical growth, demonstrating capabilities in propulsion, structures, avionics, recovery, and systems integration while pushing the boundaries of aerospace engineering at Oregon State.
Cetus is scheduled to fly 7/25/2026.
Vehicle Specifications
System Infrastructure
Propulsion
Cetus is powered by the Mira 2 engine. Tested for repeatable, reliable, and efficient performance with a pintle injector design optimized for stability and combustion efficiency.
Avionics
Custom telemetry boards provide high-frequency pressure, temperature, and acceleration data throughout flight. Onboard IMU and GPS enable real-time tracking and post-flight analysis.
Recovery
Dual-stage parachute deployment system with redundant pyro-ejection charges. Two in house manufactured ballutes stabilize descent followed by a main parachute for soft landing.
Airframe
Thin-walled carbon composite skin bonded to aluminum bulkheads, designed to isolate flight stresses and minimize structural mass.
Fluids
Optimized fluid delivery system featuring custom cryogenic ball valves and components for reliable operations.
Ground Support
Fully automated launch pad with remote propellant fill, valve actuation, and launch countdown sequencing managed from a mobile ground control station.
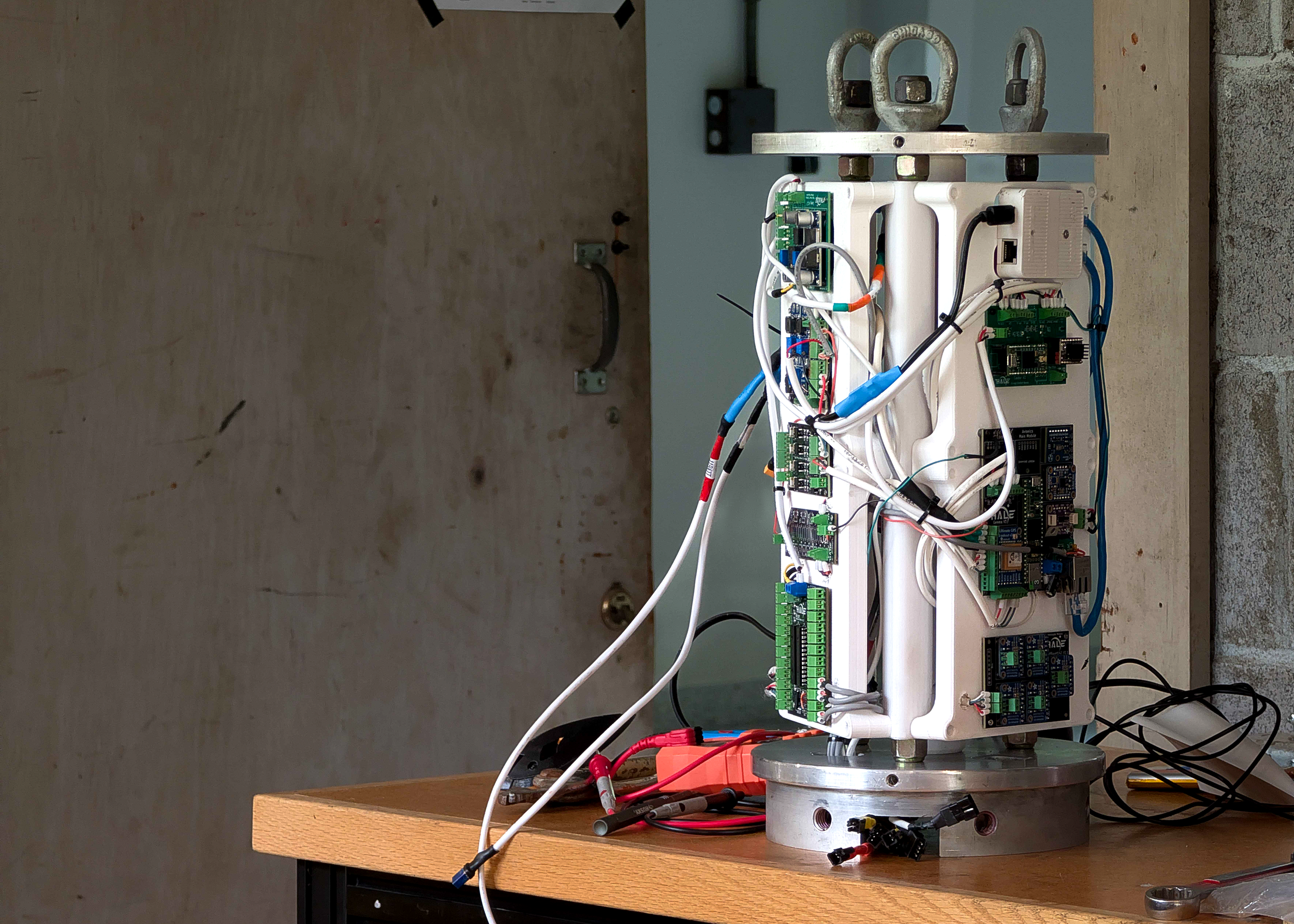
Avionics
A fully custom avionics stack developed in-house for data acquisition, flight control, and recovery deployment.
Telemetry & Data Acquisition
The Cetus avionics system is built around custom-designed telemetry boards capable of sampling pressure, temperature, and IMU data at high frequency throughout flight. Every sensor channel is logged to onboard storage and simultaneously transmitted to ground stations via a telemetry downlink for real-time monitoring and post-flight analysis.
Flight Control & Recovery
An integrated GPS module provides real-time position tracking from ascent to landing, enabling apogee detection and recovery event timings. The flight computer runs deterministic control logic, continuously monitoring altitude, velocity, and acceleration to arm and fire recovery sequences at the correct stages of flight.
Redundant Pyro Channels
Dual-redundant pyro channels ensure reliable recovery deployment in the event of a component failure. The deployment sequencing is cross-checked by both the primary flight computer and a dedicated backup computer, providing multiple layers of redundancy for recovery events. This deployment architecture was successfully validated during Project DOVE.
Ground Station
All telemetry is streamed to a mobile ground station telemetry dashboard to display vehicle state, trajectory, and system health during flight.

Recovery
A dual-stage parachute deployment system designed to reliably recover the Cetus flight vehicle.
Deployment Architecture
At apogee, two in-house manufactured ballutes are deployed to stabilize the vehicle during high-speed descent. The ballutes serve as the drogue parachute stage, providing the initial drag and deceleration needed before main parachute deployment. Once the vehicle reaches a pre-determined altitude, the main parachute deploys bringing Cetus to a safe landing velocity.
Redundancy & Reliability
Redundant pyro-ejection charges and separate harness attachment points ensure that recovery is survivable in the event of a single-point failure. Each pyro channel is independently powered, armed, and tested before flight. The deployment sequencing is cross-checked by both the flight computer and a redudant COTS flight computer.
Project DOVE
Deployment Operations Verification ExperimentProject DOVE was a helicopter drop test conducted at the McMinnville Oregon Airport. The test article was flown to an altitude of 1,500 ft and released with the drogue parachute deployed. Onboard custom avionics triggered two black powder charges in tender descenders at 1,000 ft, deploying the main parachute. The test was fully successful, validating the custom avionics onboard, deployment timing, and recovery system performance.
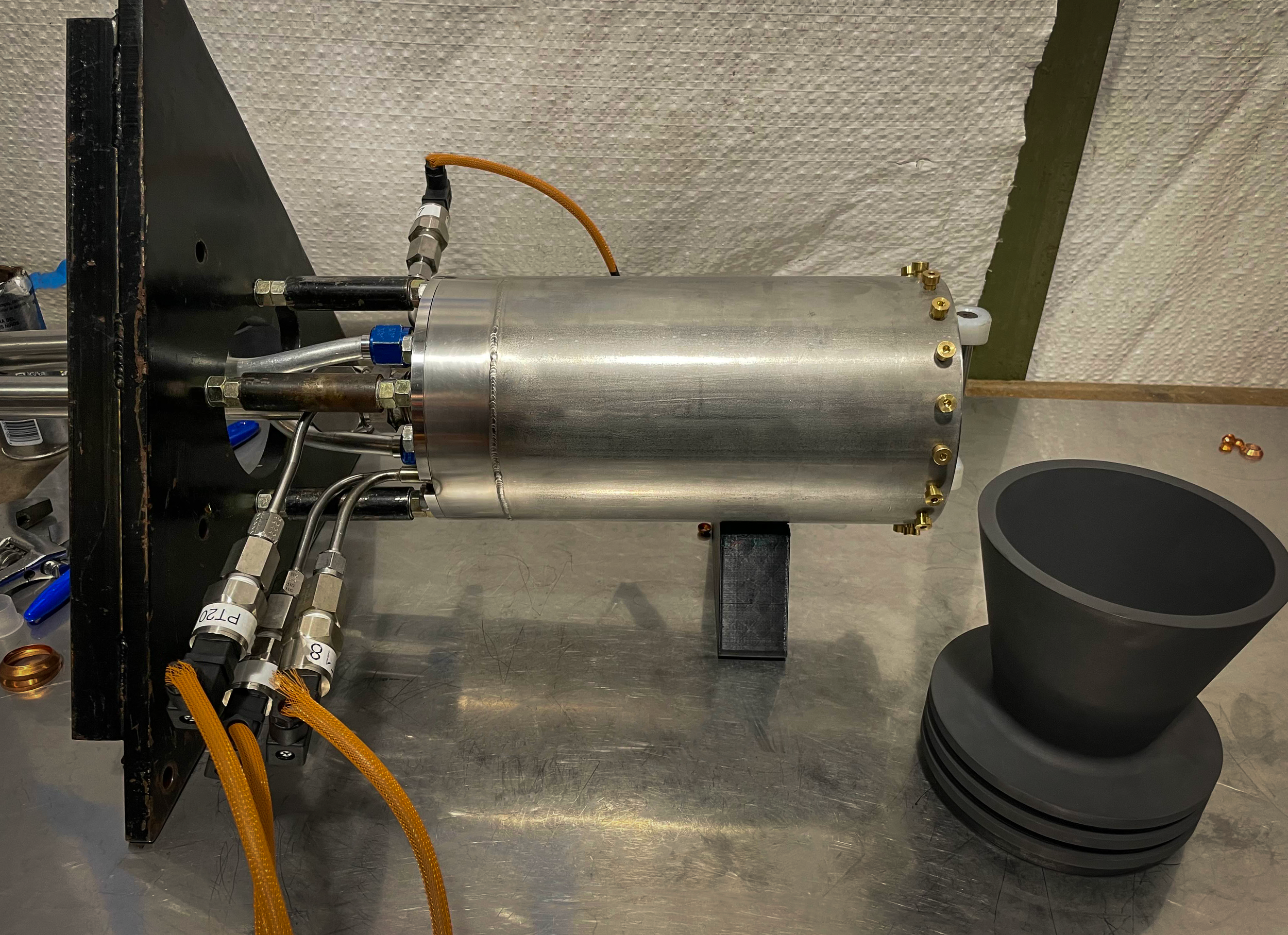
Propulsion
Cetus is powered by the Mira 2 engine, HALE's second-generation liquid engine optimized for efficiency, weight, and flight performance.
Mira 2 Engine
The Mira program has been in development for over 7 years. Mira 2 features a pintle injector design to provide combustion stability and efficiency. With a measured thrust of 1,730 lbf and a chamber pressure of 350 psi, the engine has been validated through multiple static fire tests.
Mira 2 Static Fire Tests
Static Fire 01
December 2024Static Fire 02
February 2026Cetus Static Fire
Conducted on May 10, 2026, the HALE launch team successfully completed a full-duration static fire of the Cetus launch vehicle. The test validated autonomous launch countdown handshakes, liquid oxygen tank chill and fill procedures, engine ignition and steady-state performance, and the full onboard avionics suite in a flight-representative configuration. Engine performance improvements from an upgraded injector design were confirmed through analysis of chamber pressure and thrust data.
Cetus Static Fire
May 10, 2026